[DL] YOLO v2 논문 리뷰
이번 포스팅에서는 YOLO의 두 번째 버전인 YOLO9000에 대해 살펴보도록 하겠습니다. 이번 논문은 개인적으로 상당히 읽기 쉽게 구성되었다고 생각합니다. 논문의 제목은 YOLO9000:Better, Faster, Stronger으로 이전 버전에 비해 개선한 점을 Better, Faster, Stronger이라는 세 가지 측면에서 살펴본다는 점이 흥미로웠습니다(내용은 어려웠습니다ㅠ). 이전 버전에 비해 성능이 크게 향상한YOLO9000의 개선점들에 대해 살펴보겠습니다.
What’s the Problem?
- YOLO v1은 Faster R-CNN과 비교했을 때 localization error, 즉 객체의 위치를 잘못 찾는 에러를 자주 범합니다.
- 또한 다른 region proposal based model에 비해 recall 지수(실제 객체인 사물을 객체라고 인식한 비율)가 상대적으로 낮습니다.
Improvements
앞서 언급한 논문의 구성에 맞게 Better, Faster, Stronger라는 세 가지 측면에서 기존 모델에 대한 개선점을 살펴보도록 하겠습니다.
Better
간혹 딥러닝에서는 모델의 성능을 끌어올리기 위해 네트워크를 더 깊게 혹은 더 넓게 설계합니다. 하지만 논문의 저자는 빠르고 정확도가 높은 객체 검출 모델을 원하기 때문에 네트워크의 복잡도를 늘리는 대신에 네트워크를 간소하게 만들고 representation을 더 쉽게 배울 수 있도록 만들었습니다.
1) Batch Normalization
Batch Normalization을 적용하여 학습 속도를 향상시키며 정규화(regularization) 효과를 더해줍니다.
YOLO9000에서는 Batch Normalization을 모든 conv layer마다 추가하여 mAP가 2% 정도 상승했습니다.
2) High Resolution Classifier
YOLO v1에서는 이미지의 크기를 448x448 크기로 resize 해줍니다. 이 때 원래 학습시켰던 pretrained된 모델은 모두 224x224 정도의 작은 이미지 분류에 적응했기 때문에 크기가 큰 이미지에 대해서는 낮은 성능을 보입니다.
이러한 문제를 해결하기 위해서 새로운 모델을 448x448 크기의 이미지를 분류 모델로 학습시킵니다. 이 때 사용되는 분류 모델의 이름은 darknet-19입니다. YOLO9000의 논문의 저자들이 자체적으로 설계한 모델입니다. 10epochs, ImageNet 데이터셋을 사용하여 학습시켜 고해상도 이미지에 대한 학습을 진행하였습니다.
이를 통해 4% 정도의 mAP 성능 향상했습니다.
3) Convolutionl With Anchor Boxes
- 먼저 pooling layer를 제거하여 네트워크의 출력단이 더 큰 크기를 가지도록 했습니다. 기존 YOLO v1의 경우 최종 출력단이 7x7 크기로, 상당히 낮은 해상도로 학습을 진행했기 때문입니다.
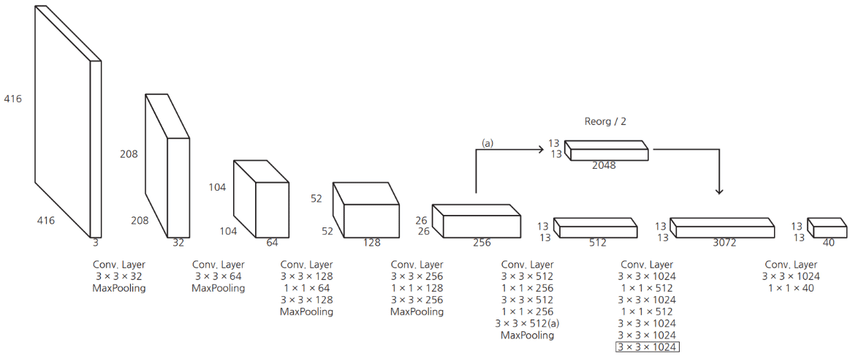
[그림 1] YOLO v2 model architecture
이미지 크기를 448x448이 아니라 416x416으로 바꿔 feature map의 크기가 홀수로 만들었습니다. 대체로 큰 객체일 경우 이미지의 중앙을 차지하는 경우가 많고, feature map의 크기가 홀수이기 때문에 정중앙의 cell에 대해서 bounding box를 예측하는 것이 가능하기 때문입니다.
마지막으로 각 cell마다 anchor를 사용한다. anchor를 사용하면 예측하는 bounding box의 수가 98개에서 1000개 이상으로 크게 늘기 때문에 정확도는 상대적으로 떨어집니다. anchor를 적용할 경우 69.2% mAP, recall은 88%인 반면, 미적용 시의 경우 mAP 69.5%, recall은 81%의 수치를 보였습니다. 즉 약간의 정확도 하락으로 높은 recall 값을 얻게 되어 localization error 문제를 어느 정도 해결할 수 있습니다.
4) Dimension Clusters
- Faster R-CNN은 사전에 anchor box의 scale과 aspect ratio를 사전에 미리 정해두어(prior hand pick) 9개의 anchor box를 사용했습니다. 하지만 모델이 스스로 최적의 anchor box 크기를 정하도록 하기 위해 ground truth box를 기반으로 k-means clustering을 사용했습니다.

[그림 2] IOU distance metric
- 일반적인 k-means clustering의 경우, 유클리디안 거리를 기준으로 군집을 분류합니다. 하지만 이같은 방식을 사용할 경우 box가 겹치는 여부와 상관없이 중심점의 위치에 따라 군집이 정해지는 문제가 발생합니다. 논문의 저자는 이를 해결하기 위해 IOU distance metric을 통해 군집을 결정하는 방식을 사용했습니다.
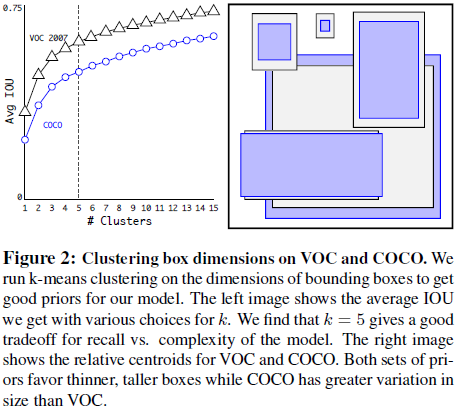
[그림 3] Cluster 수와 Avg IOU 사이의 상관관계
cluster의 수 k를 늘릴 수록 평균 IOU가 커지는 효과가 있으나 모델의 복잡도가 상승하게 됩니다. 논문의 저자는 둘 사이의 균형을 맞추기 위해 k=5로 지정하였습니다.
clustering을 통해 선택한 default box 5개의 평균 IOU 값이 anchor box 9개를 사용하여 학습했을 때보다 0.1 정도 높은 결과를 보였습니다.
5) Direct location prediction
anchor box를 YOLO에 적용할 경우 생기는 문제점은 box의 중심점 좌표인 x,y 를 예측하는 데서 모델이 불안정하다는 것입니다. 초기의 중심 좌표들이 잘못 설정되면 이미지의 아무 점에서 마무리될 수 있다. 또한 random으로 지정하게 되면 모델은 안정되기까지 오랜 시간이 걸린다.
논문의 저자는 이를 해결하기 위해 offset을 예측하는 것이 아니라 grid cell과 관련된 위치 좌표를 예측하는 접근법을 사용합니다.

[그림 4] Bounding boxes with dimension priors and location
중심좌표는 시그모이드를 통해서 0으로 initialize하면 너비과 높이 역시 0으로 초기화 했을때 prior, anchor box의 값들에서 시작될 수 있게 됩니다.
이를 통해 5%의 성능을 향상시켰습니다.
6) Fine-Grained Features
YOLO v2는 13x13 feature map에서 객체 검출을 예측합니다. 이 정도 크기는 큰 객체를 검출하기에 충분하지만 작은 객체를 검출하지 못할 수 있다.
따라서 26x26 layer 에서 그다음 conv layer를 적용하지 않고 26x26x512의 특징맵을 13x13x(512x4)로 변환한다음(26x26에서 중심을 기준으로 2x2로 나눈 네 조각을 concatenate) detection을 위한 output으로 이어줍니다.
여기서 1%의 성능향상이 있습니다.
7) Multi-Scale Training

[그림 5] Multi-scale training
YOLO v2는 SSD 모델처럼 다양한 image scale에 대한 학습을 진행합니다. 논문에서는 320, 320+32, 320+322, …, 320+329 크기의 이미지를 학습시킵니다. YOLO가 원래 이미지 크기의 1/32 크기를 줄인 feature map을 추출하기 때문에 이와 같은 크기로 설정했다고 합니다. 10 batch마다 input shape을 변경시켜 학습시킵니다.
기본적으로 mAP값이 크게 상승하였고 resolution을 높힐수록 mAP값이 더 높아졌습니다.
Faster
논문의 저자는 로보틱스나 자율 주행차에서 사용될 수 있을 정도로 빠른 성능을 보이는 Object detection 모델을 설계하고자 했습니다. 이를 위해 가장 먼저 했던 작업은 baseline model로 사용되는 VGG 네트워크로부터 벗어나는 것이었습니다.
1) Darknet-19
- VGG-16 모델은 성능은 준수하지만 필요 이상으로 많은 파라미터를 가지고 있다는 단점이 있습니다.

[그림 6] Multi-scale training
- 논문의 저자는 학습을 위해 커스텀한 CNN 모델인 Darknet-19를 설계했습니다. Darknet은 accuracy는 88%를 보이지만 파라미터 수는 5억 개 정도로 크게 줄였습니다.
2) Training for classification
분류 학습을 위한 상세 내용을 설명합니다.
epochs=160, learning rate=0.1, weight decay = 0.0005, mementum = 0.9
3) Training for detection
객체 탐지 학습을 위한 상세 내용을 설명합니다.
5개의 bounding box는 5개의 좌표(confidence score, bounding box offsets)와 20개의 class score를 예측합니다. 각 grid cell에서는 총 5 x (5 + 20) = 125개의 예측값을 가집니다.
data augmentation을 위해 random crops, color shifting을 사용했습니다.
Stronger
논문의 저자는 image classifcation의 범주는 수 천이 넘는 반면, object detection의 범주는 수 십개밖에 되지 않는 점을 극복하는 방안을 제시합니다.
바로 detection 데이터셋과 classification 데이터셋을 섞어 학습하는 방식입니다. detection 데이터셋이 입력으로 들어오면 YOLO v2 loss function을 통해 학습시키며, classification 데이터셋이 입력으로 들어오면 classifcation loss function을 통해 학습시킵니다.
이러한 방식으로 모델을 학습시킬 시 주의할 점은 노포크 테리어, 요크셔 테리어, 버들링턴 테리어는 모두 “개”라는 범주에 속하는 종들로 “개”라는 범주와 완전히 별도의 범주가 아니라는 것입니다. 이러한 범주 관계를 상호 배타적이지 않게 만들기 위해 multi-label 모델을 사용합니다.
1) Hierarchial classification
ImageNet label은 WordNet이라는 언어 데이터베이스 구조 개념을 기반으로 작성되었습니다. WordNet에서 노포크 테리어와 요크셔 테리어는 공통적으로 “테리어”, “사냥개”, “개”라는 범주에 속합니다. “노포크 테리어”와 “개”를 상호 배타적이지 않게 label을 붙이기 위한 작업에 매우 적절하다고 할 수 있습니다. 전체 WordNet을 사용하는 대신에 ImageNet label을 기반으로 계층 트리를 구성합니다.
계층 트리를 구성하기 위해 WordNet 기반으로 label 수가 공통 범주에 속하는 수에 따라 label을 늘려갔습니다. 이를 통해 1000개에 해당하던 범주가 1369개까지 크게 늘어났습니다.
[그림 7] Label prediction by using Conditional Probability
- 계층 트리를 사용할 경우 주어진 label과 각 하의어의 확률에 대하여 모든 노드에서 조건부 확률을 구합니다. 가령 이미지가 “노포크 테리어”인지 계산하기 위해서는 다음과 같이 계층 트리의 루트에서 특정 노드까지의 경로에 대한 조건부 확률을 모두 곱해줍니다.
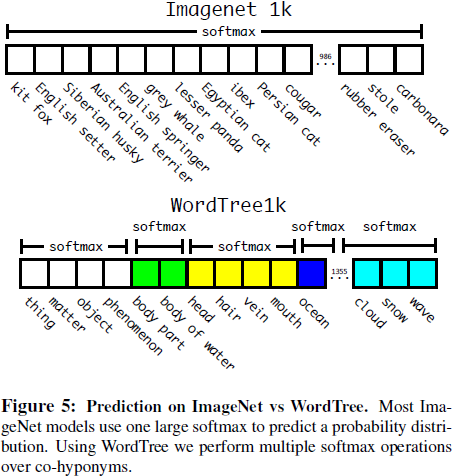
[그림 8] Prediction on ImageNet vs WordTree
- 이를 통해 위와 같이 입력 이미지가 어떤 구체적인 범주에 속하는 것이 아닌 어떠한 상위 범주에 속하는지에 대한 softmax 함수를 적용하는 것이 가능해집니다.
2) Dataset combination with Word Tree
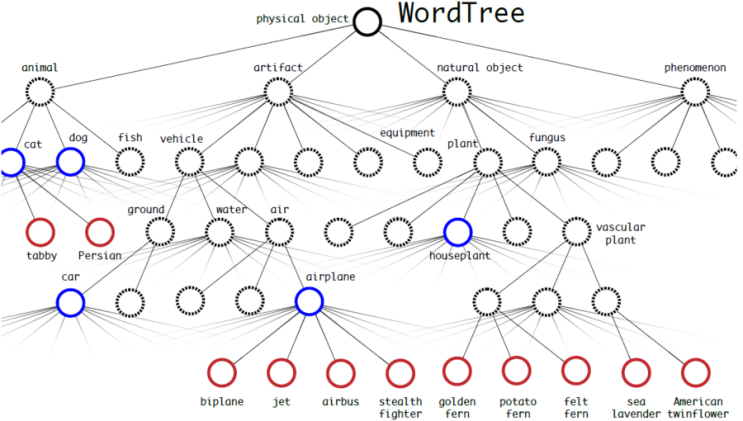
[그림 9] Word Tree
- ImageNet 데이터셋과 COCO 데이터셋을 활용하여 위와 같은 WordTree를 만들었습니다.
3) Joint classification and detection
위와 같은 WordTree는 9418개의 label을 가집니다. 이러한 데이터셋을 활용하여 YOLO9000(왜 v2가 아닌 9000이 붙는지 이유를 알게 되었습니다….)
detection 데이터셋이 입력으로 들어오면 YOLO v2 loss function을 사용해 역전파를 진행합니다. 하지만 classification 데이터셋이 입력으로 들어올 경우, 해당 label과 상위 범주에 대해서만 역전파를 진행합니다.
Conclusion
YOLO v2는 기존 객체 탐지 모델의 장점들을 포함시켜 모델 아키텍쳐에 변화를 주었습니다. 하지만 개인적으로 흥미로운 점은 딥러닝 모델 설계를 위해 k-means clustering과 같은 머신러닝 기법을 도입하거나 예측 label 수를 늘리기 위해 WordNet을 사용한 부분입니다. 기존의 방식으로부터 독창적인 시도를 통해 더 강력한 모델을 만들고자 한다는 점에서 해당 논문을 굉장히 흥미롭게 읽었습니다.
Reference
YOLO v2 논문
상세하게 파고 들어 논문을 이해하는데 큰 도움이 된 블로그
논문을 목차별로 잘 설명한 블로그
Dimension Clusters에 대해 참고한 블로그